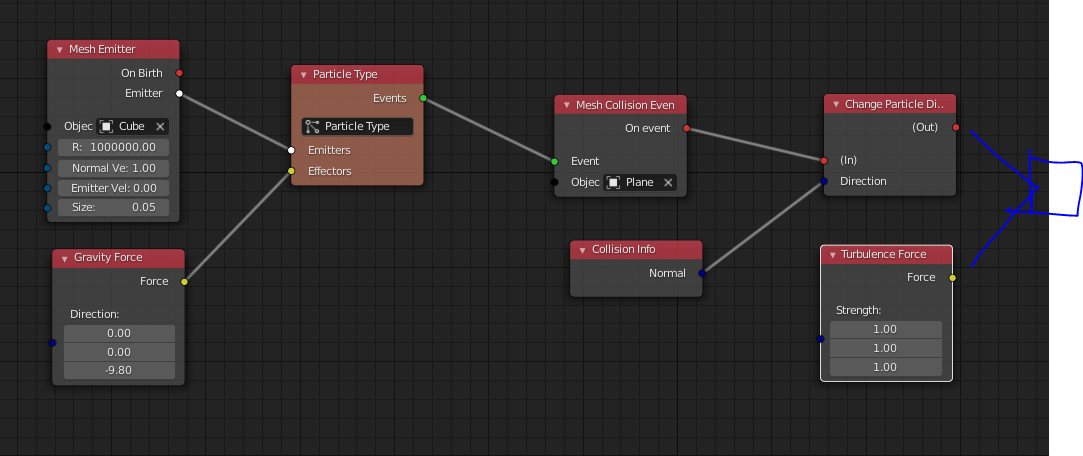
An exmaple limitation I stumbled upon testing the function nodes branch right away, in the case I present in the picture I want a force to affect particles only after they collide with the plan, but there is no way to make this since the forces are just present in the particle type node, I think having the “effectors” present just in the particle type node is not a good design, a particle type is a thing, and what and when do we want something to affect particles is a different thing.
Like for example in the future having an SPH solver that we can change to a granular solver, or having a FLIP solver to affect a granular solver that drives a cloth for example, there may be A LOT of situations that having things that way is a big limitation.