I had the same issue
I believe that the only solution is the following
you will need first to find the reverse XYZ euler information,
as there currently no rotation vector node (it still needs to be converted from cycles)
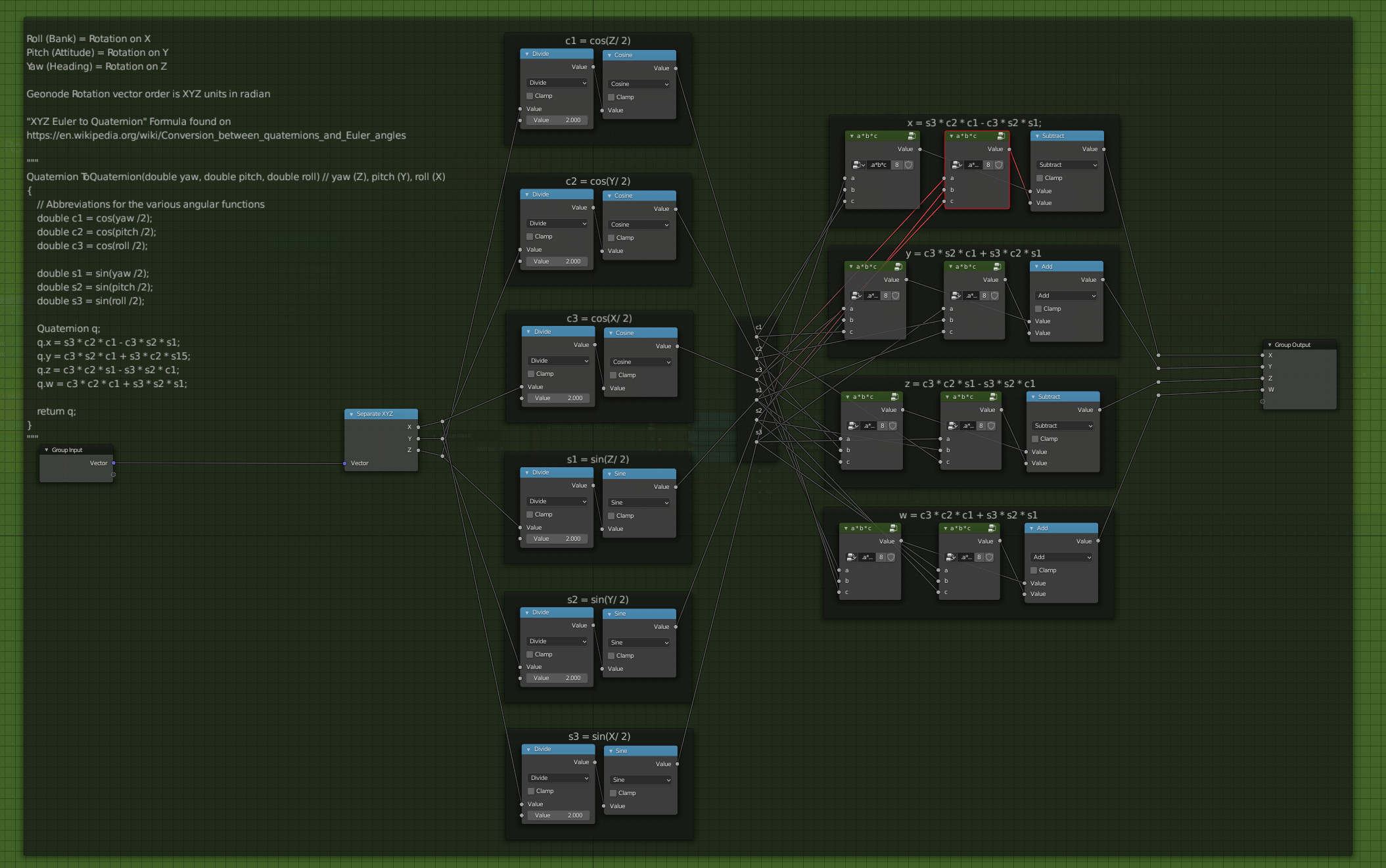
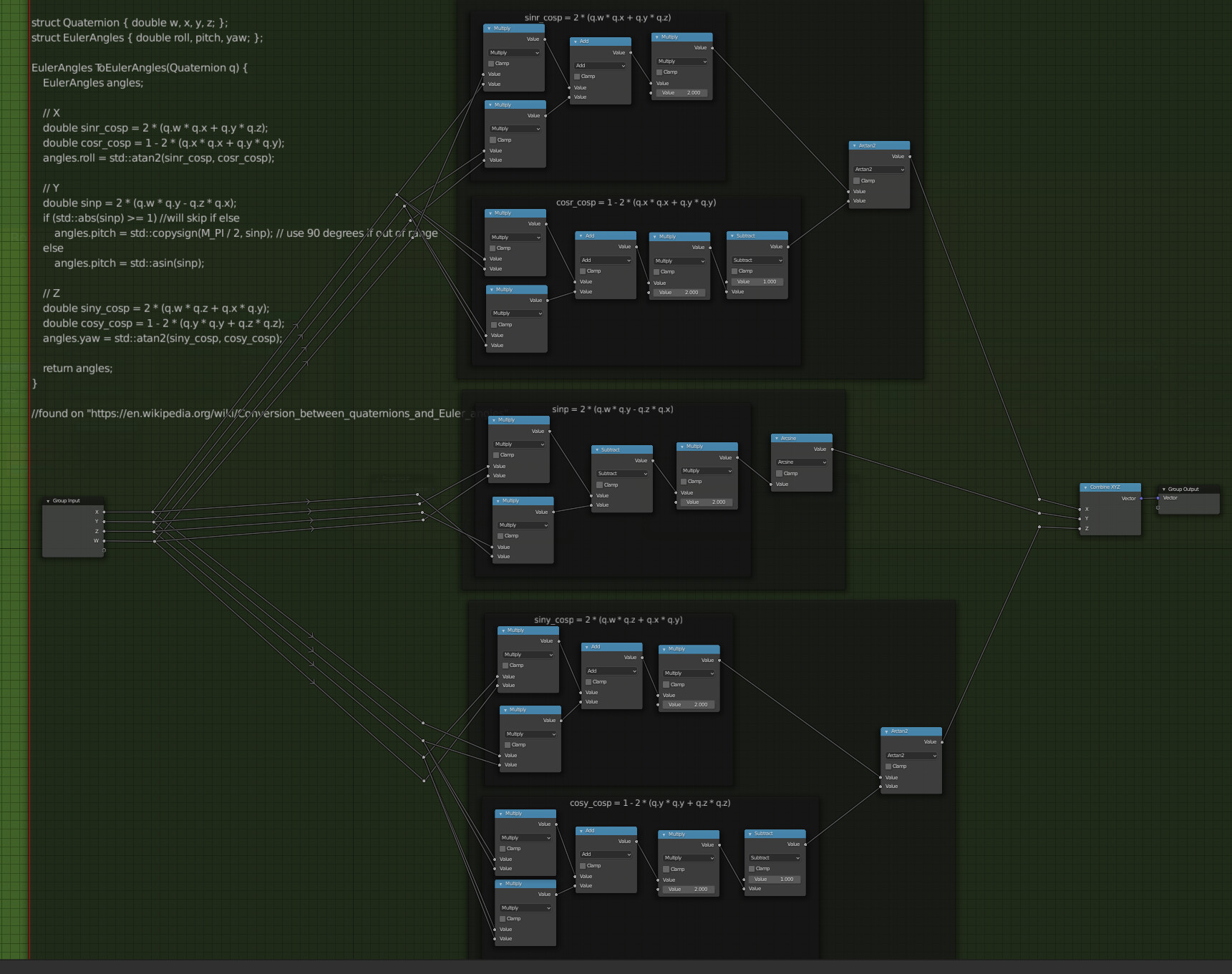
you will need to use quaternion to do this, here’s a XYZ euler to quaternion and quaternion to euler nodegroup example
after that you can find the reverse XYZ by doing this

Unfortunately this translate node don’t work with XYZ euler, so you will need to convert your angle to a direction, which can be done like this

And it’s working
Easy right?
Here’s the file
https://pasteall.org/blend/f1db32d546b44b2e97e7e2138d808d1d