Is it just me or does this start to feel a bit like an automated way of doing something much like the effect on the main character for Project Gold.
Likely still a long way to go, but adding some sort of ‘art direction’ type controls and one could in theory end up with much the same result without having to hand rig and animate every ‘fracture’.
I used the nice workaround from @filedescriptor and changed it to work in the older buildbot build. Added a second collection with heavier objects to fall onto a 500 piece sleeping shattered box.
I couldn’t work out constraints, so all of the pieces get triggered at once. However, I was able to make any pieces below a certain height be static bodies, which really shows the power of the nodal workflow. This scene was very crash prone but I managed to get a render out.
The sim speed was fine…pretty much realtime to sim it on my basic ryzen 5000 laptop.
@LukasTonne im pretty impressed with the results and the easy implementation.
Im not a programmer, but how diffuicult would a OpenCL implementation be in the future. Or are there better ways to get this to work on the GPU allready?
Nice test. Do you know why did the fracture start before the collision even happened? It feels that the collision box is not matching the object very well.
The fracturing isn’t done as part of the modifier, but pre-made from what I can tell. It’s triggering the shards to be active as soon as one of the objects hits. @jamez Correct me if I’m wrong!
@dfelinto thanks. All shards are being triggered at once, as soon as one of the shards is hit. Most likely the best way to do it in future would be to use constraints that link all shards. Then the constraint would be broken by a direct collision.
I will be interested to try this once the branch has matured. @filedescriptor all of the shards below a certain height as made to be static bodies, the rest are all active from the start.
Yes, you are quite right that does happen. Not sure if it is the convex shape being a bit off, or the sphere triggering a collision a frame or so early? Could also be a substeps issue.
I’ve run into an issue with two possible solutions and can’t quite decide which is better.
There is a set of rigid body properties that are intricately connected, namely mass, collision shape, and static/kinematic motion type options.
A body with a non-moveable collision shape (e.g. a static plane or convex triangle mesh) can only ever be a static object.
A static object must have zero mass.
A zero-mass body is always static.
These are internal requirements in Bullet, but the equivalent geometry attributes don’t necessarily have to follow the same rules. There is an advantage to keeping attributes completely independent from each other and rules for these properties would only be applied to the internal Bullet data.
Allowing any combination of shape, mass, and motion type makes it easier to construct bodies since it doesn’t matter in which order attributes are defined. Otherwise changes to one property can override changes to another property, which could be difficult to understand.
On the other hand having no rules at all can lead to non-sensical combinations, like a static body with non-zero mass. IMO that is still preferable.
On the user level, easy to understand is more important. If there is a static body, the mass as defined by the user should simply be ignored (and internally set to 0). Predictable results are very important and the order in which attributes are defined should not matter at all. To users, those kinds of Bullet internals should not be relevant.
The risk this might become a time sink for users is way too high in my opinion.
Trying to make things ‘idiot-proof’ in my opinion (outside of making sure Blender does not crash) would be a huge waste of time that could otherwise be spent getting this system polished and into main. You can already do nonsensical things with the existing nodes if you seek them and the worst that happens is that nothing changes. The whole idea of “Blender for dummies” is not going to happen, there will still be a learning curve even with artist-friendly designs like Fields.
The best the team can do is make do on their promise to eventually ship ready-made node group assets for things beyond hair (which users can potentially use as a starting point for more complex setups, since it is already established that they work).
The specific problem i’m struggling with is that some property changes of rigid bodies (collision shape, mass, ‘static’ flag) require a very specific update order. It’s important to remove bodies from the simulation before changing between static and dynamic motion, but also don’t want to constantly add and remove bodies from the world if unnecessary. I’m using a lazy-init approach, where changes to these properties can remove a body from the world if the motion type changes, but it only gets added back after all updates have been done. On a more general level Bullet “documentation” consists mostly of disconnected forum posts with varying levels of expertise, makes it hard to determine what’s valid and what isn’t. I’m adding a ton of tests though to have a reliable baseline.
It’s coming back to life, slowly. I’ve started a new package build for the latest version (link).
Now i can finally use the instancing feature i’ve been working towards: Objects can generate physics geometry, and the Realize Instances node handles makes correct copies of the rigid body templates. This allows me to reproduce some of the conventional object-based workflow for constructing rigid bodies and constraints.
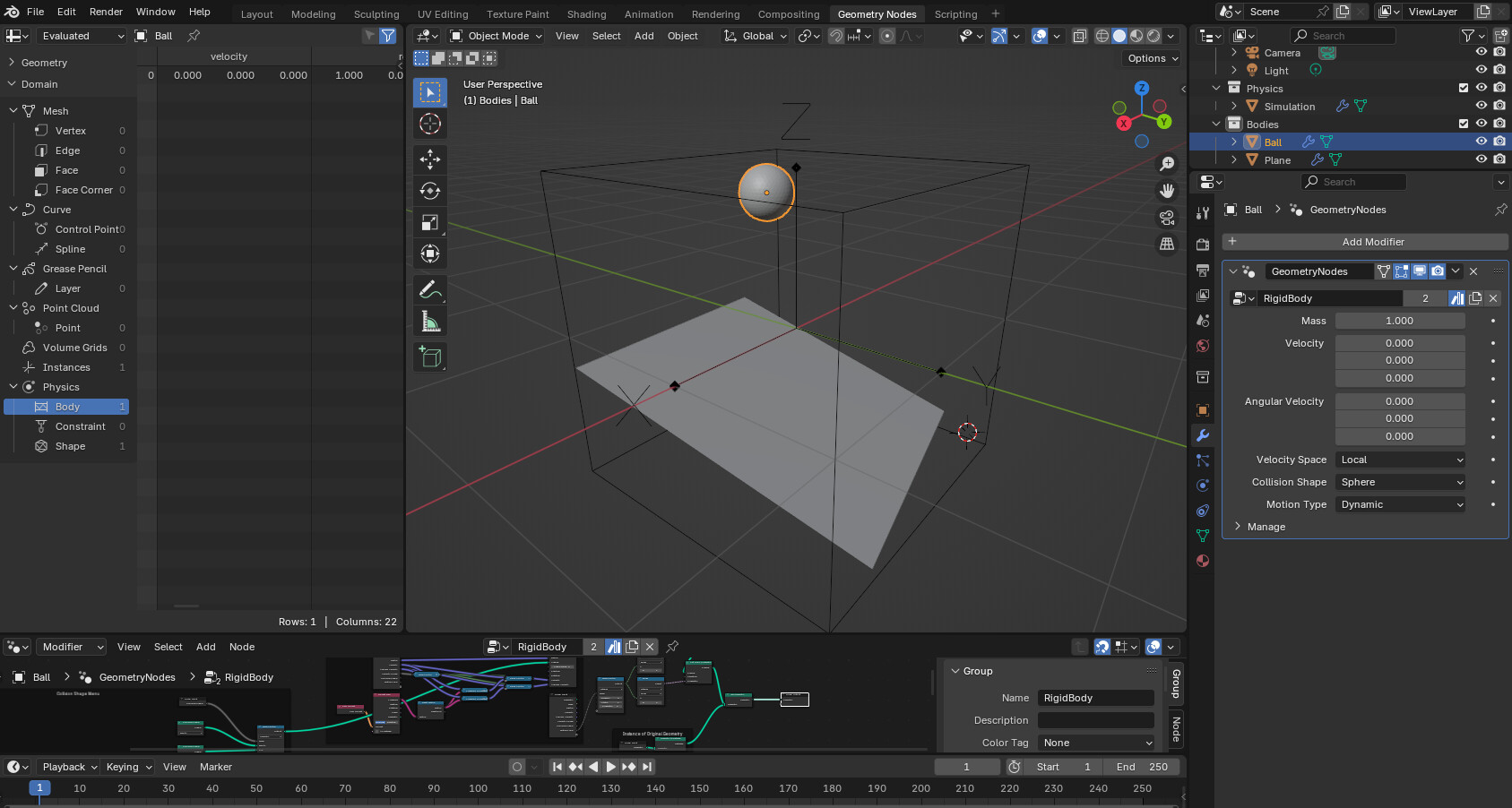
A “Rigid Body” node group can be added to an object to turn it into a rigid body:
Adds a single rigid body to the geometry.
Constructs a shape by type, using the overall dimensions of the object for size.
Sets up basic parameters such as mass, motion type, etc.
Offers parameters for initial velocity and other commonly used features
Another object acts as the “simulation domain”. It uses a collection to control which objects are simulated (all the objects with “Rigid Body” nodes should go in there). The objects are realized, joined with the active physics world, and simulated in a simulation zone.
The physics movement is transferred back to visual instances. The simulation object cannot move other objects directly through geometry nodes, so instead it outputs instances which replace the original objects, which do not move themselves and can simply be hidden.
This is by no means the only way to create rigid body simulation setups, but i think it’s always a good idea that a new system can do what the old system did. Obviously this is not a complete replacement yet, but it offers some new possibilities.
I do hope the devs consider jolt… been suggesting it for a few months now without much interest but it’s interesting to see Godot implementing it as their go to solver. 6 times faster? can you share documentation? I’m curious if having a faster and more accurate solver is something blender devs are interested in or if for now they just want to recreate current legacy (outdated solver) in geo nodes.