Hello.
In 2.79, I used this nice operator with which I could turn an object (e.g., camera) around a vector (here, e.g., axis = object_camera_vec).
bpy.ops.transform.rotate(value=(90.02pi/360.0),
axis=object_camera_vec,
orient_matrix=camera.rotation_euler,
constraint_axis=(False, False, False),
orient_type=‘GLOBAL’,
mirror=False, proportional=‘DISABLED’,
proportional_edit_falloff=‘SMOOTH’,
proportional_size=1, snap=False,
snap_target=‘CLOSEST’, snap_point=(0, 0, 0),
snap_align=False, snap_normal=(0, 0, 0),
release_confirm=False)
This option ‘axis’ does not exist anymore in 2.80. I found the following in the API description for 2.80:
bpy.ops.transform.bend( value=(0.0) , mirror=False , proportional=‘DISABLED’ , proportional_edit_falloff=‘SMOOTH’ , proportional_size=1.0 , snap=False , snap_target=‘CLOSEST’ , snap_point=(0.0 , 0.0 , 0.0) , snap_align=False , snap_normal=(0.0 , 0.0 , 0.0) , gpencil_strokes=False , center_override=(0.0 , 0.0 , 0.0) , release_confirm=False , use_accurate=False )
So, what now? What replaces this ‘axis’ option?
Thanks in advance for some comments.
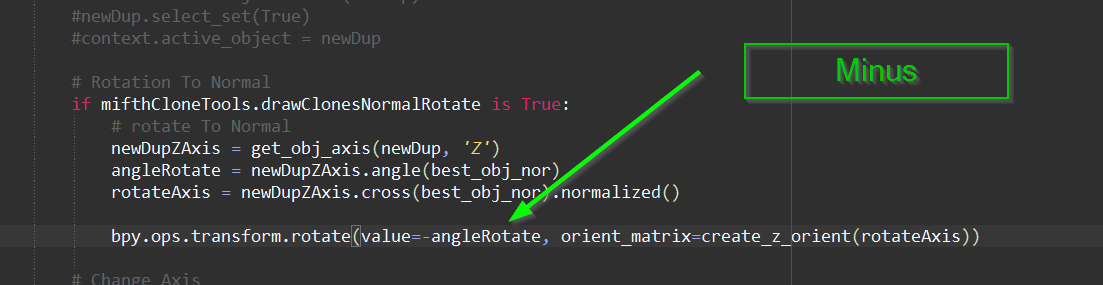
EDIT: Please, forget this operator above, I meant this one here:>
bpy.ops.transform.rotate( value=0.0 , orient_axis=‘Z’ , orient_type=‘GLOBAL’ , orient_matrix=((0.0 , 0.0 , 0.0) , (0.0 , 0.0 , 0.0) , (0.0 , 0.0 , 0.0)) , orient_matrix_type=‘GLOBAL’ , constraint_axis=(False , False , False) , mirror=False , proportional=‘DISABLED’ , proportional_edit_falloff=‘SMOOTH’ , proportional_size=1.0 , snap=False , snap_target=‘CLOSEST’ , snap_point=(0.0 , 0.0 , 0.0) , snap_align=False , snap_normal=(0.0 , 0.0 , 0.0) , gpencil_strokes=False , center_override=(0.0 , 0.0 , 0.0) , release_confirm=False , use_accurate=False )